
Основной частью МПСЗ является микропроцессор (обычно восьми-или шестнадцатиразрядный), содержащий арифметико-логическое устройство (АЛУ), которое производит арифметические операции сложения, вычитания умножения, а также реализует функции умножения (логические элементы И), сложения (логический элемент ИЛИ), отрицания или инверсии (логический элемент НЕ) и другие. Программы управления процессами вычислений, характеристики управления ценообразованием и топливоподачей и другие данные, которые в данном типе управляющего устройства не изменяются в течение всего времени его эксплуатации на двигателе, заносятся в ПЗУ методами необратимого программирования (маскирование, вжигание).
Информация от датчиков параметров рабочего процесса двигателя, которая изменяется в зависимости от режима работы двигателя и обновляется в каждом цикле вычислений после появления опорного сигнала ДНО, поступает в оперативное запоминающее устройство (ОЗУ). Эта информация хранится в ОЗУ до тех пор, пока она не будет востребована по сигналу, устанавливаемому программой, заложенной в ПЗУ.
Используя информацию от датчиков и занесенные в ПЗУ данные таблиц УОЗ, микропроцессор вычисляет оптимальный УОЗ для каждого цикла работы двигателя и формирует соответствующий этому углу сигнал на выходе контроллера для электронного коммутатора. Значения УОЗ в таблицах ПЗУ оптимизированы по какому-либо показателю рабочего процесса двигателя (максимальной мощности и минимальной токсичности и другие).
Сочетание в МПСЗ программных и аппаратных средств регулирования момента зажигания позволяет вычислять оптимальный УОЗ в течение 8—12 мкс. Преимущества МПСЗ обусловлены возможностью наращивания функций для работы от большего числа датчиков, например в случае ввода в ПЗУ программы управления УОЗ по степени детонации, а также для самодиагностирования. Для изменения алгоритма управления МПСЗ нет необходимости менять структуру всей системы. Достаточно разработать новую программу управления УОЗ микропроцессором и записать ее в ПЗУ контроллера.
Микропроцессорная система управления двигателем (МПСУД), структурная схема которой приведена на рис. 6, предназначена для управления моментом зажигания, электромагнитным клапаном экономайзера принудительного холостого хода (ЭПХХ) и тахометром.
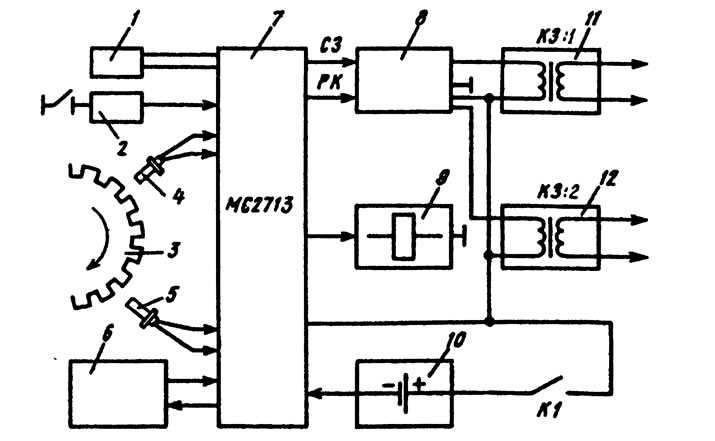
Рис. 6. Схема МПСУД: 1 - впускной трубопровод двигателя; 2 - датчик положения дроссельной заслонки; 3 - маховик двигателя; 4 - ДНО; 5 - ДУИ; 6 - датчик температуры охлаждающей жидкости; 7 - контроллер «Электроника МС2713»; 8 - электронный коммутатор; 9 - электромагнитный клапан ЭПХХ; 10 - аккумуляторная батарея автомобиля; 11, 12 - катушки зажигания К31 и К32
Для реализации оптимального закона управления УОЗ на входы контроллера поступают данные о скоростном, нагрузочном режимах и тепловом состоянии двигателя.
Информация о скоростном режиме двигателя снимается с ДНО и ДУИ. ДНО синхронизирует работу контроллера с работой двигателя, формируя в определенной фазе работы двигателя одиночный опорный импульс. ДУИ со схемой преобразования сигналов вырабатывает импульсную последовательность, которая используется микропроцессором для вычисления частоты вращения и угла поворота коленчатого вала.
По информации полупроводникового датчика 6 температуры охлаждающей жидкости двигателя контроллер корректирует характеристики управления УОЗ.
По сигналам концевого выключателя о положении дроссельной заслонки контроллер управляет электромагнитным клапаном 9 ЭПХХ, включая и выключая его в зависимости от режима работы двигателя.
По опорному импульсу ДНО контроллер 7 подает на коммутатор 8 сигнал РК, обеспечивая с помощью катушек КЗ:1 и КЗ:2 искрообразо-вание в свечах зажигания в соответствии с порядком работы цилиндров двигателя.
Комментарии посетителей