
- преобразователи квазисинусоидальных сигналов индуктивных датчиков ДНО и ДУИ в прямоугольные импульсы с логическими уровнями интегральных МОП-структур;
- преобразователь сигнала полупроводникового датчика температуры порогового типа, вырабатывающий сигналы логического нуля или логической единицы в зависимости от уровня температуры охлаждающей жидкости двигателя (ниже или выше 65°C);
- полупроводниковый датчик давления (вакуума) для определения нагрузки двигателя по степени вакуума Др в задроссельном пространстве карбюратора, имеющий на своем выходе напряжение U, пропорциональное степени вакуума;
- преобразователь «напряжение — время» U/t;
- формирователь сигнала конечного выключателя КВ датчика положения дроссельной заслонки, вырабатывающий сигнал управления электромагнитным клапаном ЭПХХ в соответствии с состоянием контактов датчика;
- устройство ввода-вывода УВВ;
- процессор Р (КМ1823ВУ1);
- восьмиразрядное ПЗУ для хранения закодированных характеристик управления УОЗ и электромагнитным клапаном ЭПХХ и служебных констант, необходимых для функционирования Р и УВВ;
- формирователь импульса зажигания ФИЗ (КМ 1223АГ 1);
- выходные ключи сигналов СЗ и РК для согласования выходов контроллера с выходами коммутатора и защиты выходов микросхем от импульсных перенапряжений и помех;
- мощный выходной ключ управления УПР ЭПХХ, переключающий электромагнитный клапан с активным сопротивлением обмотки (33,0±3,3) Ом и имеющий защиту от перегрузки по току;
- источник электроснабжения, стабилизирующий напряжение питания всех блоков контроллера на уровне 5,0±0,25 В.
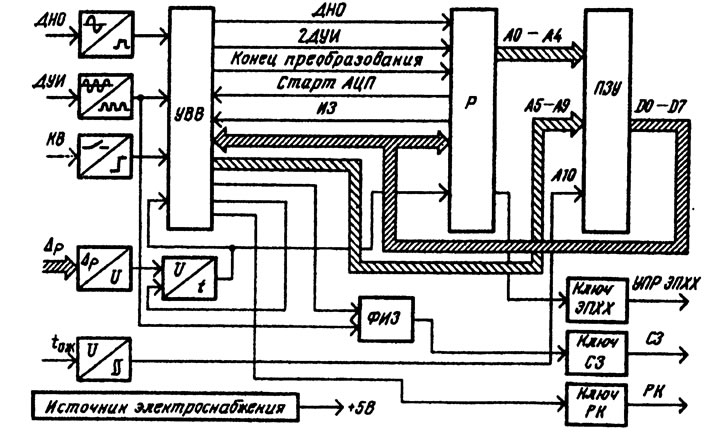
Рис. 7. Схема контроллера «Электроника МС2713»
Преобразованные в прямоугольные импульсы сигналы датчиков ДНО и ДУИ поступают на входы УВВ, где частота угловых импульсов удваивается для повышения точности вычисления УОЗ. У четырехтактных четырехцилиндровых двигателей рабочий цикл осуществляется за два оборота коленчатого вала, а одноименные такты в цилиндрах повторятся через 180°. С другой стороны, метод определения процессором угла поворота коленчатого вала основан на подсчете импульсов ДУИ с момента появления опорного импульса ДНО, вырабатываемого один раз за 60° угла поворота коленчатого вала. Поэтому необходим второй дополнительный опорный импульс со сдвигом на 180° относительно первого.
Аналоговый сигнал тензометрического датчика давления (вакуума) преобразуется в цифровой код, пропорциональный степени вакуума во впускном трубопроводе, по принципу двойного интегрирования.
Начало измерения степени вакуума и вычисления УОЗ синхронизировано с импульсом ДНО с целью исключения влияния на результаты вычислений пульсаций давления во впускном трубопроводе и неравномерности вращения коленчатого вала, вызываемых периодической сменой тактов работы двигателя.
Пять старших разрядов восьмиразрядного кода частоты вращения коленчатого вала используются для формирования части разрядов А0—А4 десятиразрядного адреса ПЗУ. По импульсу ДНО процессор формирует управляющий сигнал «Старт АЦП», по которому УВВ пускает преобразователь «напряжение—время». С этого момента начинается процесс преобразования напряжения на выходе датчика давления в цифровой код. В конце этого процесса по сигналу «конец преобразования» УВВ на адресных входах А5—А9 ПЗУ устанавливает код одной из 32 заложенных в ПЗУ страниц, в которой хранится характеристика регулирования УОЗ по частоте вращения коленчатого вала, соответствующая измеренной степени вакуума во впускном трубопроводе. Разрешающая способность контроллера составляет 2,7 кПа (20 мм.рт.ст.) по степени вакуума и 25 мин'1 по частоте вращения коленчатого вала. УОЗ изменяется с дискретностью, равной или кратной половине периода импульсов УИ.
Характеристики управления УОЗ в зависимости от скоростного и нагрузочного режимов работы двигателя вместе со служебными константами занимают 1 кбайт информационной емкости ПЗУ. В ПЗУ заложены характеристики для прогретого и непрогретого двигателя. Преобразованный импульс датчика температуры охлаждающей жидкости, по которому выбирается соответствующая характеристика, поступает на старший разряд А10 адреса ПЗУ.
В состав процессора входит счетчик угла поворота коленчатого вала, в который по импульсу ДНО загружается код УОЗ, вычисленный в предыдущем цикле работы контроллера. Затем начинается счет импульсов ДУИ. При переполнении счетчика на выходе процессора появляется импульс зажигания ИЗ, который через УВВ поступает в ФИЗ, В свою очередь ФИЗ вырабатывает сигнал постоянной скважности, подаваемый через ключ СЗ на выход контроллера. Импульс зажигания ИЗ используется УВВ для формирования сигнала разделения каналов РК, Каналы коммутатора переключаются в момент появления ИЗ, а правильность переключения подтверждается импульсом ДНО, что повышает помехозащищенность контроллера.
Вычисление угла поворота коленчатого вала и формирование импульса зажигания ИЗ, определяющего момент разрыва первичных цепей катушек зажигания, производится аппаратными средствами процессора независимо от работы остальной части схемы контроллера.
Одновременно с вычислением УОЗ для текущих значений частоты вращения коленчатого вала, температуры охлаждающей жидкости и степени вакуума во впускном трубопроводе процессор контроллера определяет состояние электромагнитного клапана ЭПХХ. Сигнал управления электромагнитным клапаном ЭПХХ вырабатывается контроллером с учетом особенностей алгоритма его работы, согласно заданной программы и подается на ключ ЭПХХ, обеспечивающий прекращение подачи топлива в карбюратор двигателя в режиме принудительного холостого хода.
Вычисленные значения УОЗ запоминаются. На выходе контроллера устанавливается соответствующий логический уровень сигнала управления ЭПХХ. После этого процессор переходит в режим ожидания следующего импульса НО. Далее цикл работы контроллера повторяется.
В контроллере «Электроника МС2713» предусмотрена защита от перемены полярности питающего напряжения и замыкания контактов разъема на корпус. Контроллер сохраняет работоспособность при подаче напряжения электроснабжения +18 В, при наличии в бортовой сети автомобиля перенапряжений с амплитудой до 150 В, не требует обслуживания и регулирования в процессе эксплуатации и может быть адаптирован для любого двигателя путем программирования ПЗУ под его характеристики управления.
Применение МПСУД с контроллером «Электроника МС2713» для управления моментом зажигания и электромагнитным клапаном ЭПХХ позволяет снизить расход топлива и токсичность отработавших газов двигателя, улучшить динамические качества автомобиля. Это обусловливается стабильностью воспроизведения заданных характеристик управления УОЗ с максимально возможным приближением их к границе зоны детонации.
Конструктивно контроллер выполнен на печатной плате размером 150x60 мм с односторонним расположением элементов и двухсторонней металлизацией, которая закреплена на основании контроллера и защищена стальным кожухом.
Комментарии посетителей