
где φх, φ1 и φ2 — углы поворота коленчатого вала, соответствующие кодам nх, n1 и n2; nх — код текущей частоты вращения коленчатого вала двигателя; n1 и n2 — соответственно ближайшие к коду nх коды меньших и больших табличных значений частоты вращения коленчатого вала.
Для повышения точности определения и отслеживания УОЗ вычисление угла φх производится поэтапно. Вначале осуществляется интерполяция по частоте вращения коленчатого вала для табличных значений n1 и n2 (рис. 8, а), а затем между найденными опорными значениями углов φ1х и φ2х проводится интерполяция по степени вакуума во впускном трубопроводе (рис. 8, б). Интерполяция по степени вакуума между значениями Δp1 и Δp2 выполняется также, как интерполяция по частоте вращения коленчатого вала.
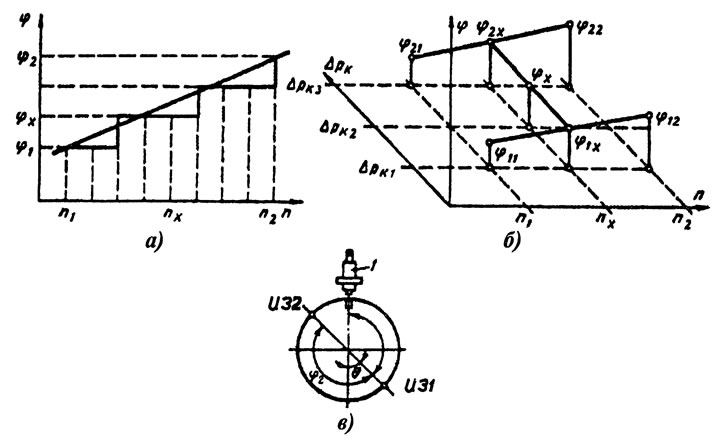
Рис. 8. Схема работы МПСЗ
Отслеживание УОЗ производится контроллером при каждом обороте коленчатого вала, а изменение его значения — после расчета УОЗ соответствующего текущим скоростному и нагрузочному режимам двигателя. Определение скоростного и нагрузочного режимов производится за один или несколько оборотов коленчатого вала в зависимости от частоты его вращения. При низких частотах вращения коленчатого вала вычисление частоты его вращения завершается до первого импульсы зажигания И31 (рис. 8, в), а при высоких частотах — до появления второго импульса зажигания И32 или за полный оборот коленчатого вала. Если вычисление частоты вращения коленчатого вала заканчивается до появления И31, то в течение второй половины оборота вычисляется степень вакуума во впускном трубопроводе, и значения УОЗ интерполируются. Когда вычисление частоты вращения коленчатого вала завершается после И31 или ИЗ2, определение степени вакуума производится при втором обороте коленчатого вала после формирования импульса ДНО 1, а интерполяция производится после И31 на втором обороте.
Комментарии посетителей